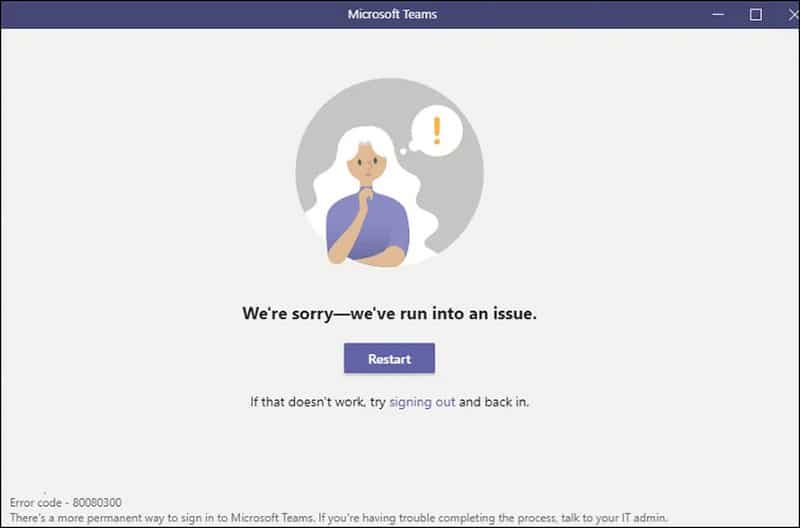
La mise à jour KB5003169 à destination de Windows 10 en version 1909 pose un problème : suite à son installation, il n'est plus possible de s'authentifier sur Teams, Outlook et OneDrive.
Un message d'erreur avec le code "80080300" s'affiche sur Teams, comme si la connexion Internet ne fonctionnait pas bien, ou qu'il y avait un problème du côté de Microsoft. En vérité, le problème vient de votre machine si vous êtes sous Windows 10 v1909 et que vous venez d'installer la mise à jour KB5003169. Cette version de Windows 10 serait la seule version concernée.
Microsoft explique ce problème touche les applications Microsoft 365 et que certains utilisateurs ont remontés des problèmes sur Teams, OneDrive et Outlook. La firme de Redmond précise que le problème disparaît tout seul après redémarrage de la machine, ce qui a pour effet de finaliser l'installation de la mise à jour.
Si ce n'est pas le cas, vous devez patienter et utiliser les versions Web de Teams, Outlook et OneDrive en attendant qu'une solution pérenne soit proposée. Sinon, la suppression de la mise à jour doit également permettre de résoudre ce problème. Exécutez la commande suivante en tant qu'administrateur sur votre machine :
wusa /uninstall /KB:5003169
La semaine dernière, Microsoft a déployé son Patch Tuesday de mai 2021 donc sans surprise nous commençons à avoir des retours sur les effets de bords des mises à jour déployées. Avez-vous constaté ce problème ou un autre problème ?
Quelques mois après le lancement des nouveaux modèles Poco, un nouveau modèle vient d'être présenté officiellement par Xiaomi : le Poco M3 Pro. Découvrons-le ensemble...
Pour ce nouveau modèle, Xiaomi a repris en très grande partie la fiche technique d'un autre modèle dévoilé récemment : le Xiaomi Redmi Note 10 5G. Ces deux appareils ont des caractéristiques techniques communes, notamment le SoC Dimensity 700 5G et l'écran. En effet, le Poco M3 Pro est équipé d'un écran LDC en Full HD+, d'une taille de 6,5 pouces avec un taux de rafraîchissement dynamique de 90 Hz.
Pour le reste, nous avons le droit à :
Mémoire RAM LPDDR4X (4 Go ou 6 Go)
Stockage UFS 2.2 (64 Go ou 128 Go)
Module photo à l'arrière : trois capteurs avec un capteur principal de 48 mpx et deux capteurs de 2 mpx
Une batterie de 5 000 mAh, compatible charge 18 Watts
Chargeur de 22.5 Watts (utile pour recharger d'autres appareils plus rapides)
Lecteur d'empreintes sur le côté, NFC et prise Jack
Wi-Fi 6
Compatible 5G
Android 11 avec la surcouche MIUI 12
Finalement, la différence se situe au niveau du design : l'intégration du module photo arrière est différente et il y a l'imposant logo "POCO" qui est très visible aussi à l'arrière. Pour l'anecdote, le poids est identique aussi : 190 grammes.
Malgré que ce nouveau smartphone POCO soit une copie du Redmi Note 10 5G d'un point de vue technique, il n'en reste pas moins un smartphone intéressant, avec un bon rapport qualité/prix.
Où acheter le Xiaomi Poco M3 Pro ?
Le POCO M3 Pro 5G est disponible en plusieurs coloris et il existe deux versions : l'une avec 4 Go de RAM et 64 Go de stockage, et une autre avec 6 Go de RAM et 128 Go de stockage. Le prix public est de 199 euros pour la version 64 Go et 229 euros pour la version 128 Go.
La bonne nouvelle c'est qu'il est disponible dès aujourd'hui et qu'il est déjà en promo ! Vous pouvez le retrouver sur différents sites d'e-commerces (Amazon, Cdiscount, etc.) et à l'occasion du lancement mondial, il y a des offres early brids, l'occasion de l'obtenir à prix réduit dès maintenant !
Mozilla a commencé à déployer une nouvelle fonctionnalité de sécurité nommée "Site Isolation" au sein de Firefox. Elle va permettre de renforcer la protection des utilisateurs grâce à l'isolation des sites Internet.
Après deux ans de développement dans le cadre du projet "Fission", la fonctionnalité "Site Isolation" est disponible pour toutes les versions de Firefox. Jusqu'ici, elle était réservée à la version Firefox Nightly, une version dans laquelle elle était testée depuis octobre 2020. De son côté, Google propose déjà cette fonctionnalité depuis la sortie de Chrome 67, en mai 2018.
Comment activer l'isolation des sites dans Firefox ?
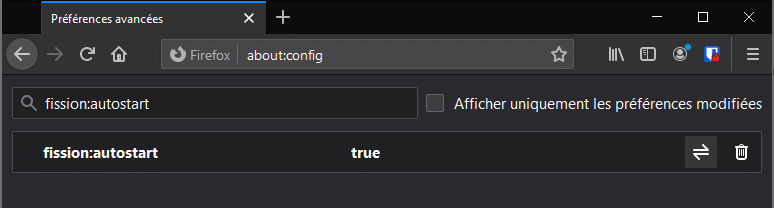
Pour activer la fonctionnalité "Site Isolation" dans Firefox, il faut accéder à la configuration avancée. Dans la barre d'adresse, saisissez :
about:config
Un avertissement va s'afficher... Validez. Ensuite, il faut mettre la valeur "True" pour le paramètre suivant :
fission:autostart
Pour finir, redémarrez le navigateur.
Quel est l'intérêt de la fonctionnalité d'isolation des sites ?
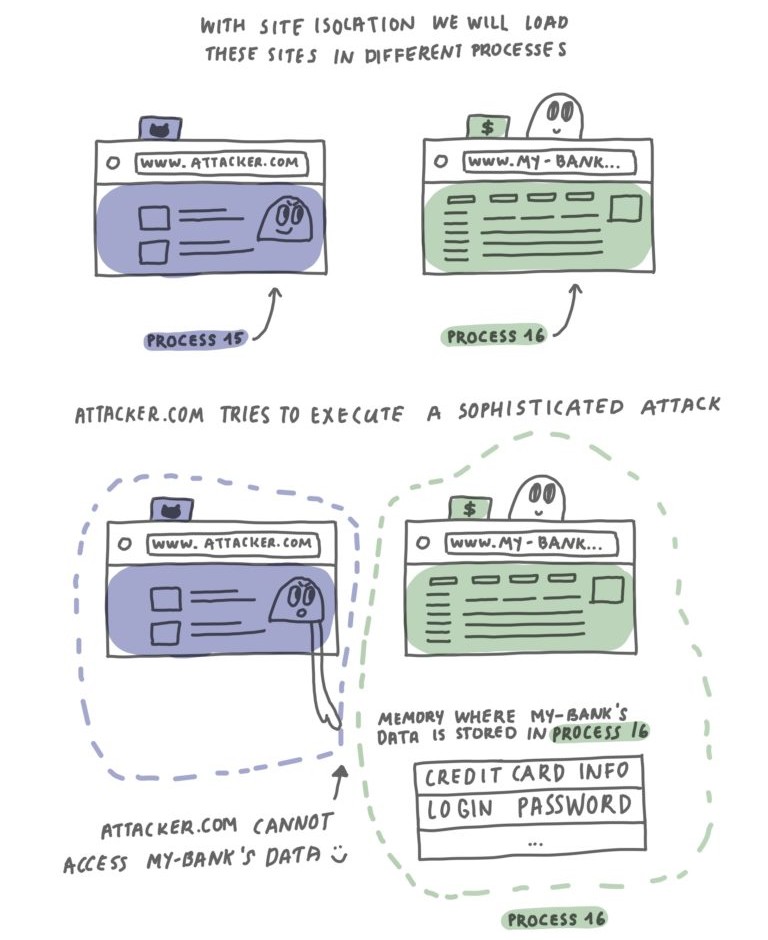
Cette fonctionnalité permet d'isoler dans des processus distincts le contenu des différents domaines, des différents sites Internet. Cela signifie qu'il y a une isolation qui se crée à chaque fois que l'on ouvre un autre site dans un nouvel onglet, mais aussi sur un même site lorsqu'une page intègre du contenu tiers chargé à partir d'un autre domaine.
Grâce à l'isolation des sites, le navigateur protège l'utilisateur contre certaines attaques. Par exemple, l'isolation des sites permet de contrer des attaques comme Spectre ou Meltdown. Cela va empêcher un site A de lire les données d'un site B et donc de dérober des informations personnelles ou des données.
Bien sûr, qui dit processus supplémentaire, dit augmentation de la consommation de mémoire RAM, tandis qu'au niveau du processeur c'est une bonne manière de mieux répartir la charge sur les différents cœurs. La consommation des ressources... Un sujet sensible lorsque l'on évoque les navigateurs. Ce qui est intéressant, c'est qu'une page qui est lourde à charger ou qui est plantée ne viendra pas perturber le chargement d'une autre page qui s'effectue dans un processus différent.
Isolation des sites dans Firefox - Source : Mozilla.org
Le marché des logiciels VPN est très à la mode depuis plusieurs années, ce qui a pour conséquence directe de voir une quantité importante de solutions fleurir dans ce secteur. Lorsque l'on recherche un logiciel VPN de confiance, certains noms reviennent souvent en tête de liste, notamment la solution NordVPN.
En fait, cette solution fait généralement parler d'elle pour deux raisons : elle bénéficie d'une solide réputation et elle réalise très souvent des offres promotionnelles relayées par certains sites, comme cela a pu être le cas sur IT-Connect. Un moyen d'accroître sa visibilité, sa popularité et d'augmenter son nombre d'utilisateurs : plus de 14 millions aujourd'hui.
Face à cette situation, on peut se demander : comment choisir le bon VPN ? Dans le cas où l'on choisit NordVPN, on peut se demander si l'on peut réellement faire confiance à ce fournisseur de VPN ? Pour obtenir une réponse à ces questions, il faut déjà prendre connaissance des nombreux tests et avis qui circulent sur Internet, en complément des informations fournies par NordVPN. Par exemple, cet article propose un compte rendu très complet au sujet de NordVPN.
Pour ma part, dans cet article, je vais tenter de synthétiser les avantages et les inconvénients de NordVPN.
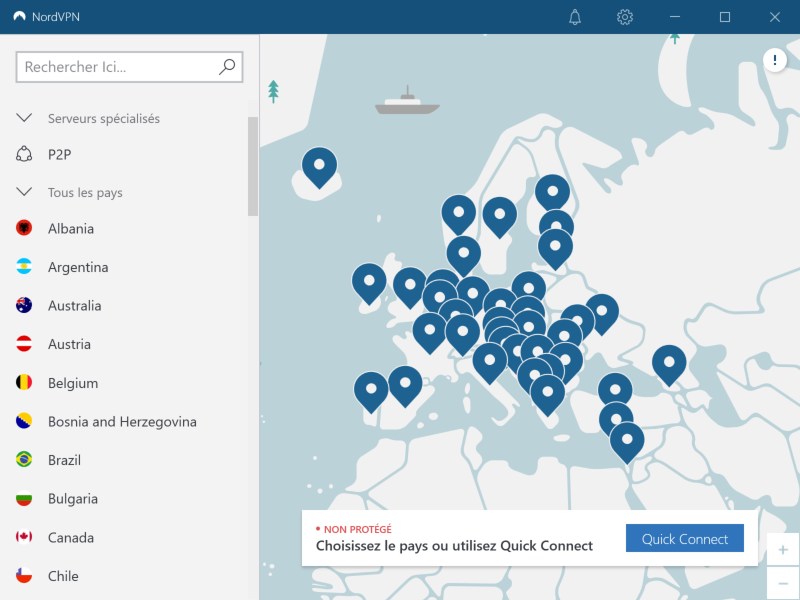
Après avoir regardé différents avis, le site de NordVPN et réalisé moi-même des essais, voici ce que je peux vous dire quant aux principaux avantages et inconvénients de NordVPN. L'inscription et l'installation du client VPN sont deux étapes très simples.
Client NordVPN sur Windows
A. Avantages de NordVPN
Disponibles sur plusieurs systèmes d'exploitation
À l'instar de ses principaux concurrents, NordVPN est disponible sur plusieurs systèmes d'exploitation : Windows, MacOS, et Linux, mais aussi sur smartphones et tablettes que ce soit sous Android et iOS. Une version spécifique existe pour Android TV, mais aussi pour s'intégrer aux navigateurs directement. Ce n'est pas un avantage exclusif vis-à-vis des concurrents, mais c'est avantageux tout de même.
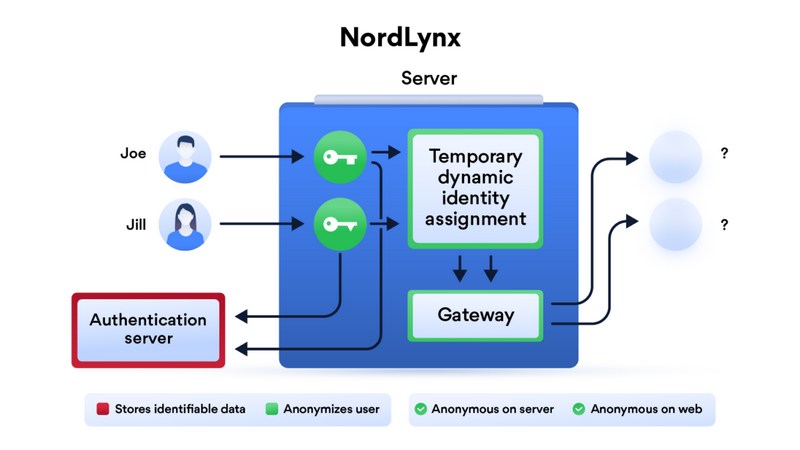
Protocole NordLynx
Qui dit VPN, dit utilisation d'un protocole pour établir ce tunnel VPN. Il y a les protocoles connus, normés et éprouvés comme IKEv2/IPsec et OpenVPN, ces derniers étant pris en charge dans NordVPN. En complément, NordVPN a développé son propre protocole propriétaire baptisée NordLynx et qui s'appuie sur un protocole open source nommé WireGuard. Choisir WireGuard n'est pas un hasard, il s'agit d'un protocole plus léger ce qui permet d'optimiser la rapidité du VPN, mais il a aussi un code source plus light : idéal lorsqu'il s'agit de réaliser un audit de sécurité de la solution.
Grâce à ce protocole qui est utilisé par défaut, NordVPN affirme améliorer à la fois la sécurité et la rapidité du VPN. Pour l'aspect rapidité, cela se confirme en faisant quelques tests de débit une fois connecté au VPN. Même lorsque l'on sélectionne un serveur dans un pays éloigné, par exemple aux États-Unis, le débit est largement suffisant pour réaliser des actions gourmandes. Par exemple, le streaming sur Netflix, je dis ça, je ne dis rien.
Enfin, pour des raisons de sécurité, NordVPN ne prend plus en charge les protocoles VPN PPTP et L2PT puisqu'ils sont obsolètes.
Une infrastructure robuste : plus de 5 300 serveurs
Le nombre de serveurs est conséquent puisqu'il y en a plus de 5 300 et ce nombre évolue régulièrement. Par exemple, on compte 230 serveurs en France et près de 2 000 aux États-Unis. NordVPN est propriétaire de ses serveurs et en assure la maintenance au quotidien, comme le font ProtonVPN et d'autres fournisseurs.
La maîtrise de cette infrastructure lui permet de garantir la sécurité et la fiabilité, mais aussi de proposer des services complémentaires plus facilement (adresse IP dédiée, P2P, Onion Over VPN pour l'accès au réseau Tor, Double VPN, etc.). Il est à noter que le client NordVPN est doté d'une fonction "Kill switch", c'est-à-dire qu'en cas de perte de connexion avec le serveur VPN, votre connexion Internet sera coupée au niveau de votre machine pour éviter une perte temporaire de l'anonymat.
Une présence dans 59 pays
La quantité importante de serveurs permet à NordVPN d'assurer une présence dans 59 pays et 5 continents. Autrement dit, cette présence permet de se connecter à un serveur VPN situé aux quatre coins du globe. Que ce soit pour contourner les restrictions géographiques pour accéder à certains contenus ou tout simplement sécuriser votre connexion lorsque vous êtes en vacances, il y aura toujours (ou presque...) un serveur NordVPN pas très loin de vous !
Fonction "Double VPN"
La sécurité et la confidentialité sont clairement au cœur de la stratégie de NordVPN. D'un côté, heureusement, car l'intérêt d'un VPN ce n'est pas seulement d'accéder aux catalogues Netflix des autres pays. Le VPN est là pour renforcer la sécurité de l'utilisateur sur Internet et pour protéger sa vie privée grâce à l'anonymisation.
Par défaut, le VPN est monté avec du chiffrement AES-256, mais pour aller encore plus loin, NordVPN propose un service de "Double VPN". Certes, cela aura un impact sur les performances, mais le double VPN permet de faire transiter votre connexion VPN au travers de deux serveurs VPN. L'objectif : doubler le niveau de chiffrement pour renforcer encore la sécurité.
B. Inconvénients de NordVPN
Le prix
On dit souvent que la qualité a un prix. On peut dire que cette expression se confirme avec NordVPN. L'abonnement, même lorsqu'il est proposé en promotion, reste assez coûteux en comparaison de certains concurrents. Le tarif mensuel reste acceptable : environ 3 euros par mois si vous prenez un engagement de deux ans. Si vous prenez seulement 1 mois pour essayer, le tarif frôle les 10 euros. Par exemple, CyberGhost qui est l'un des principaux concurrents de NordVPN est à 2 euros par mois avec un engagement de deux ans. Personnellement, je préfère payer un peu plus cher et avoir un service de qualité, mais chacun a ses priorités (je ne veux pas dire par là que CyberGhost une mauvaise solution !).
Là où ça devient intéressant, c'est qu'avec un seul compte NordVPN vous pouvez utiliser jusqu'à 6 appareils simultanément.
Son passé
Pourquoi avoir mis "Son passé" dans la liste des inconvénients ? Simplement, pour rappeler et ne pas ignorer les faits qui se sont déroulés en 2018. En effet, fin 2019, NordVPN a reconnu avoir été victime d'un piratage en mars 2018 (malheureusement, ce n'est pas le premier fournisseur de VPN à être dans cette situation). Ce piratage concernait un seul serveur basé en Finlande.
Du coup, au moment de choisir sa solution VPN, lorsque l'on voit le mot "piratage", cela jette un froid... Depuis les choses ont changé : il suffit de voir les efforts faits par NordVPN en matière de sécurité pour s'en convaincre. En complément, pour s'assurer de la sécurité et de la robustesse de sa solution, NordVPN a sollicité des cabinets externes réputés comme PwC pour auditer et tester son infrastructure. Je pense que l'on peut être rassuré à ce niveau-là et considérer cet incident de sécurité comme une histoire ancienne.
NordVPN - Conclusion
Si la solution NordVPN vous intéresse, il ne reste plus qu'à accéder au site de l'éditeur pour tenter l'expérience. En tout cas, je vous recommande d'attendre une promotion (s'il n'y en a pas déjà une en cours) avant de souscrire.
Sachez également que NordVPN est une solution originaire du Panama, ce qui n'est pas anodin : l'éditeur n'est pas soumis au "Patriot Act" américain. C'est bénéfique pour les utilisateurs puisque ce positionnement permet à NordVPN d'appliquer une politique très stricte quant aux journaux de navigation. La politique "No Log" de NordVPN est claire : l'éditeur ne collecte pas votre historique de navigation, ni la durée de vos sessions, votre adresse IP, la destination du trafic ou encore des informations sur la bande-passante consommée. Néanmoins, pour le bon fonctionnement de son service, et comme la majorité des fournisseurs, NordVPN doit conserver des informations sur votre compte client : e-mail, nom ou pseudo, coordonnées bancaires et quelques métadonnées.
Des fonctions sont intégrées aux clients NordVPN pour protéger la vie privée de l'utilisateur : Kill switch, CyberSec, antifuite DNS, ou encore l'Auto connect. Si l'on veut résumer, disons que NordVPN est une solution recommandée, car elle est fiable, sécurisée et simple à utiliser, malgré un tarif un peu plus élevé que les principaux concurrents. Personnellement, j'aime bien NordVPN, et vous ?
Dans ce tutoriel, je vous propose de découvrir WAPT 2.0 et d'apprendre à déployer un logiciel sur des postes à l'aide d'un serveur WAPT 2.0 Enterprise.
Fin mars 2021, l'éditeur français Tranquil IT a publié WAPT 2.0 Enterprise, la nouvelle version de sa solution de déploiement de logiciels et de gestion de parcs informatiques. Cette version intègre plusieurs nouveautés, avec entre autres le passage à Python 3 à la place de Python 2.7, une gestion avancée des ACL ainsi qu'une interconnexion avec GLPI. Pour en savoir plus, je vous invite à lire mon article consacré à ces nouveautés : WAPT 2.0
Aujourd'hui, je vais vous expliquer comment déployer un logiciel à l'aide de WAPT 2.0, sans trop m'attarder dans le détail sur la partie installation : elle est bien décrite au sein de la documentation officielle. D'ailleurs, ces dernières semaines, l'équipe de Tranquil IT travaille activement sur la mise à jour de la documentation pour qu'elle soit le plus claire possible.
Si vous désirez tester WAPT Enterprise, je vous invite à suivre le lien suivant puisque vous pouvez demander une licence d'essai gratuitement auprès de l'éditeur : Demander un essai WAPT
II. Installation du serveur WAPT et de la console
A. Installation du serveur WAPT sur Windows Server
Pour une instance en production, l'éditeur recommande de déployer WAPT sur une machine Linux plutôt que sur Windows. Pour mes tests, j'ai opté pour une machine Windows Server.
Le serveur WAPT s'appuie sur trois rôles clés : la partie dépôt qui sert à distribuer les paquets et qui s'appuie sur un serveur NginX, la partie inventaire et un proxy de commandes exploité via la console WAPT.
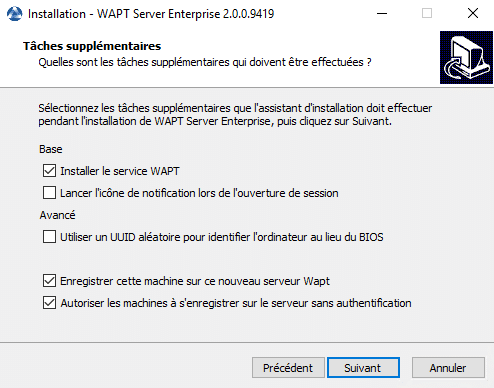
L'assistant permet d'effectuer l'installation en quelques étapes. Ce qui est important, c'est de lancer l'exécutable en tant qu'administrateur avec un compte local du serveur, et non un compte administrateur du domaine. Sinon, le serveur WAPT ne fonctionnera pas, car il y aura des services non créés (je sais de quoi je parle...).
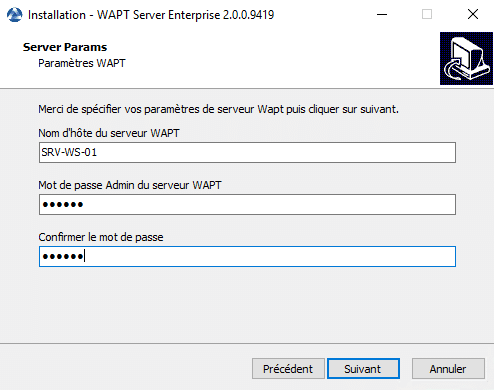
Lorsque le nom d'hôte est demandé, précisez le nom de votre machine Windows (même s'il n'y a pas de vérification DNS, ce sera cohérent au moins). Indiquez également un mot de passe admin pour WAPT. Il sera utile lorsqu'il faudra s'authentifier avec la console WAPT.
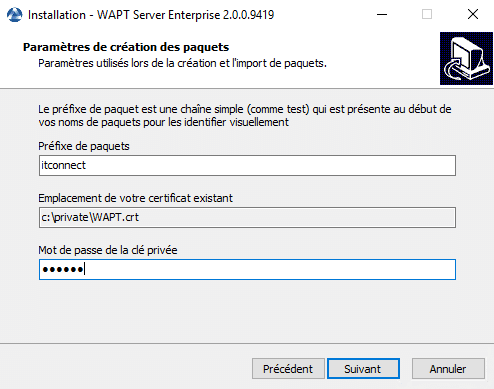
Indiquez un préfixe pour vos paquets associés à ce serveur et son dépôt, puis un mot de passe pour la clé privée du serveur.
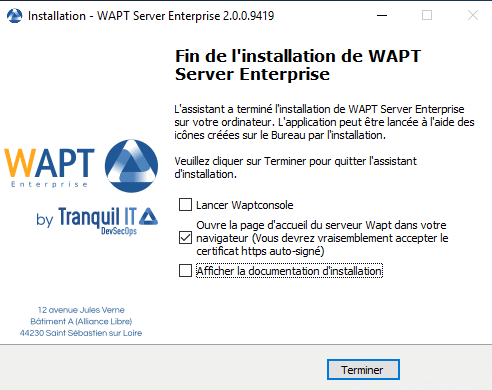
À la fin de l'installation, décochez l'option "Lancer Waptconsole" : la console ne doit pas être installée sur le même serveur que le serveur WAPT ! Vous pouvez laisser cocher l'option "Ouvre la page d'accueil du serveur...." : cela va permettre d'accéder à la page Web du serveur WAPT pour vérifier que tout fonctionne, avant d'aller plus loin.
Passez ensuite sur l'installation de la console WAPT sur une seconde machine.
B. Installation de la console WAPT
La console WAPT est un client lourd qui sert à administrer la solution WAPT au quotidien, notamment pour la gestion des paquets.
La console doit s'installer sur un serveur différent que celui utilisé pour installer le rôle "serveur WAPT" en lui-même. En fait, la console WAPT est destinée à être installée sur un serveur d'administration.
L'exécutable de la console, comme celui du serveur, se récupère depuis le site de WAPT. Ensuite, soit vous le copiez directement sur le serveur où installer la console, soit vous le mettez à disposition sur votre serveur WAPT et vous le récupérez via l'interface Web.
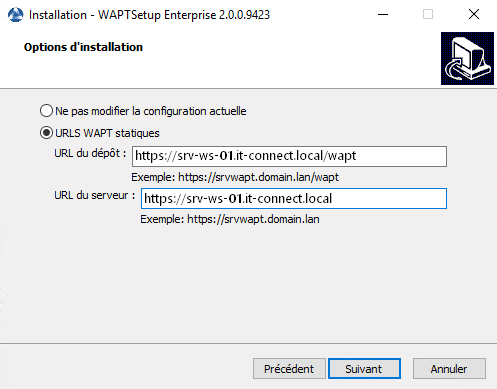
Veillez à bien indiquer le nom complet de votre serveur au sein des adresses. Si besoin, créez un enregistrement DNS dans la zone correspondante, mais cela devrait être automatique si votre serveur WAPT est membre du domaine.
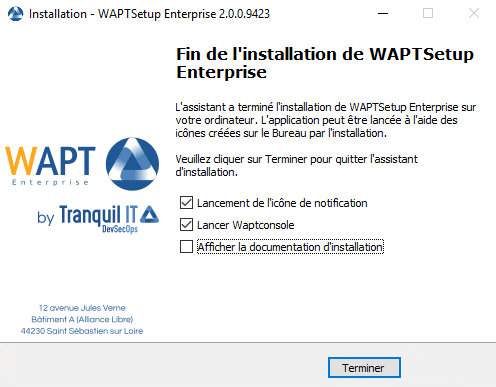
À la fin de l'installation, vous pouvez laisser cocher l'option "Lancer Waptconsole" cette fois-ci.
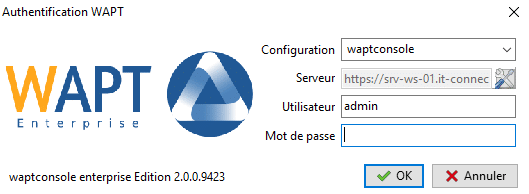
Authentifiez-vous à l'aide du compte "admin" et du mot de passe définit lors de l'installation du serveur.
C. Créer le certificat de l'admin et générer l'agent
Lorsque la console s'exécute la première fois, il est suggéré de générer l'agent WAPT : refusez. Il est nécessaire de générer le certificat de l'administrateur avant d'aller plus loin. Ce certificat est associé à une clé privée et il sera utile pour signer les paquets déployés sur les postes clients.
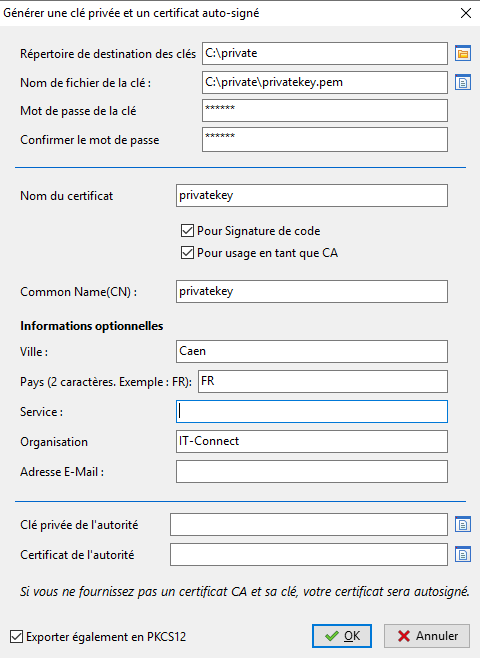
Pour démarrer la création du certificat, cliquez sur "Outils" puis "Générer un certificat". Dans l'exemple ci-dessous, la clé privée sera le fichier "privatekey.pem" et il y aura un fichier de certificat (.crt) auto-signé qui sera généré.
À la fin de la génération, cliquez sur "Yes" pour que le certificat soit copié vers le répertoire des certificats autorisés.
Ce qui donne :
Maintenant, passons à la génération de l'agent WAPT. Le certificat va être intégré à l'agent puisqu'il est dans le dossier "wapt/ssl".
Attention : vous ne devez pas ajouter votre clé privée dans le dossier "C:\ProgramFiles(x86)\wapt" (ou un sous-dossier), sinon elle sera intégrée à l'agent WAPT. Si vous distribuez le certificat et la clé privée, vous offrez la possibilité de signer des paquets, etc...
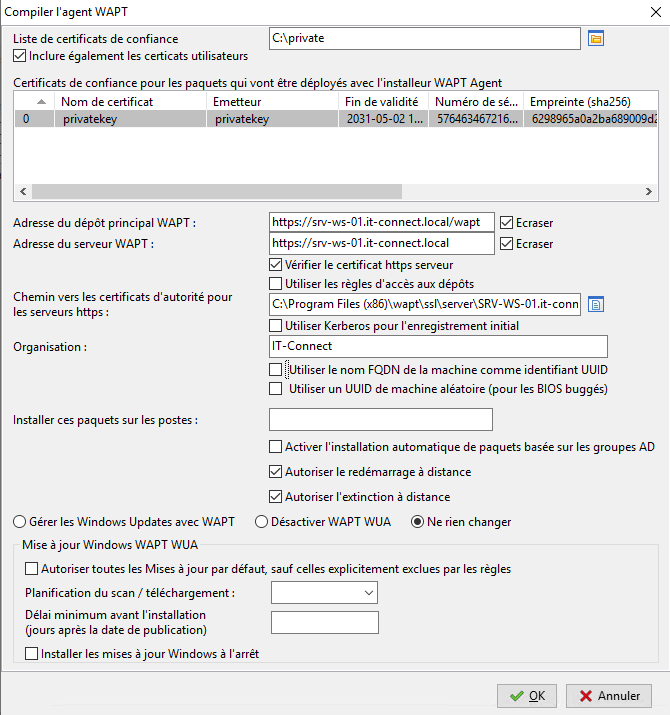
Pour générer l'agent, au sein de la console WAPT cliquez sur "Outils" puis "Générer un agent WAPT". Sélectionnez les options qui vous intéressent et démarrez la génération de l'agent. Voici un exemple :
Patientez pendant la génération de l'agent.
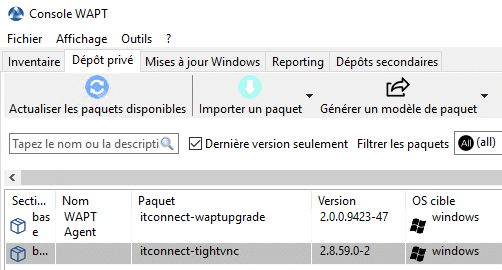
Lorsque c'est terminé, vous pouvez passer à l'étape suivante. D'ailleurs, le paquet apparaît dans l'onglet "Dépôt privé" de la console WAPT.
III. Déployer l'agent WAPT sur les postes
Il y a deux manières d'installer l'agent WAPT sur les postes : manuellement ou au travers d'une GPO. L'installation de cet agent est une étape primordiale pour faire le lien entre le poste client et le serveur WAPT.
Concrètement, depuis un poste client à partir d'un navigateur il est possible de lancer le téléchargement. Par exemple, dans mon cas le lien est :
Prenons plutôt la seconde option : le déploiement de l'agent par GPO. Ce qui nécessite d'utiliser l'outil waptdeploy.exe que l'on va exécuter par GPO avec des paramètres spécifiques.
Suivez les étapes suivantes pour déployer l'agent WAPT par GPO. L'objectif étant de lancer l'installation au démarrage de la machine.
1 - Récupérez l'exécutable de waptdeploy.exe sur votre serveur WAPT, pour ma part :
2 - Ouvrez la console de Gestion des stratégies de groupe et créez une nouvelle GPO avec le nom que vous souhaitez, par exemple : "Installer-WAPT-Agent".
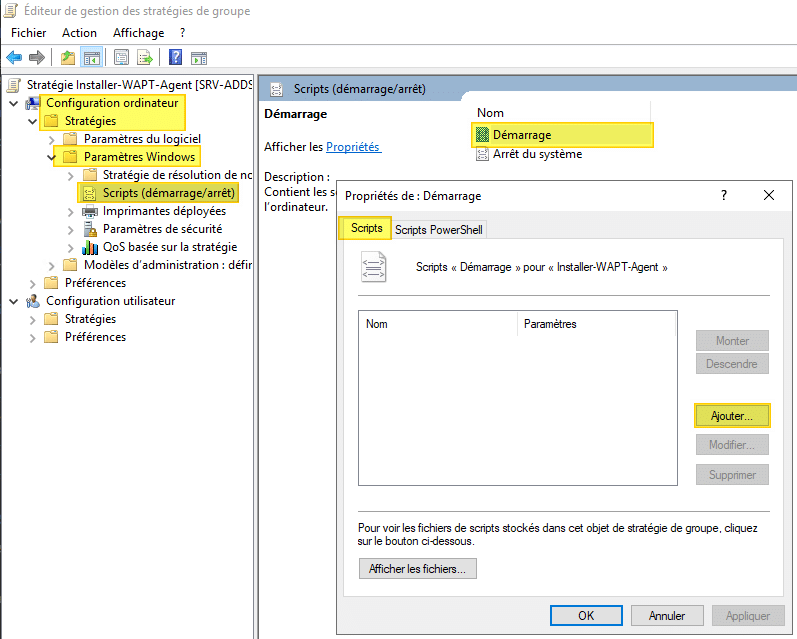
3 - Parcourez les paramètres de cette façon : Configuration ordinateur > Stratégies > Paramètres Windows > Scripts (démarrage/arrêt) > Démarrage
Une fenêtre va s'ouvrir, au sein de l'onglet "Scripts", cliquez sur "Ajouter" puis sur "Parcourir".
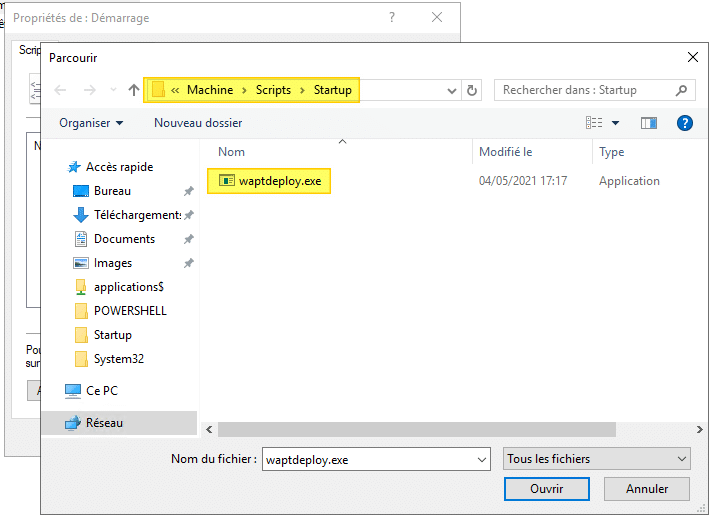
À cet endroit, collez l'exécutable "waptdeploy.exe" et cliquez sur "Ouvrir", comme ceci :
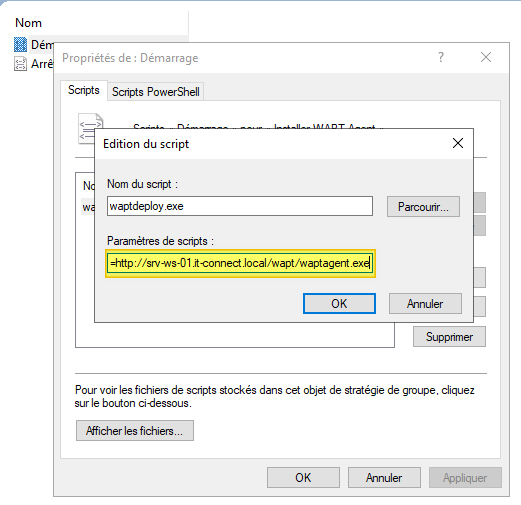
Ensuite, retournez sur l'interface Web de votre serveur WAPT pour récupérer la commande indiquée sur la page d'accueil. Pour être plus précis, je parle de cette commande :
Nous allons modifier cette valeur pour intégrer le chemin vers l'exécutable de l'agent WAPT (waptagent.exe). En fait, il faut ajouter "--waptsetupurl=http://srv-ws-01.it-connect.local/wapt/waptagent.exe" à la commande (en adaptant avec l'adresse de votre serveur).
Validez... La GPO est prête, il ne reste plus qu'à tester sur un poste client pour valider le déploiement de l'agent WAPT.
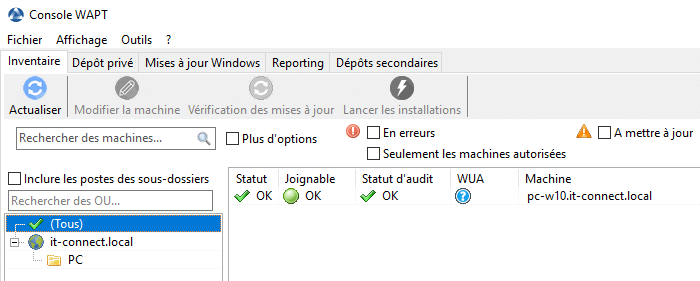
Au sein de la console WAPT, dans l'onglet "Inventaire" la machine doit remonter. Le temps que l'agent se déploie sur la machine cible, cela peut prendre quelques minutes.
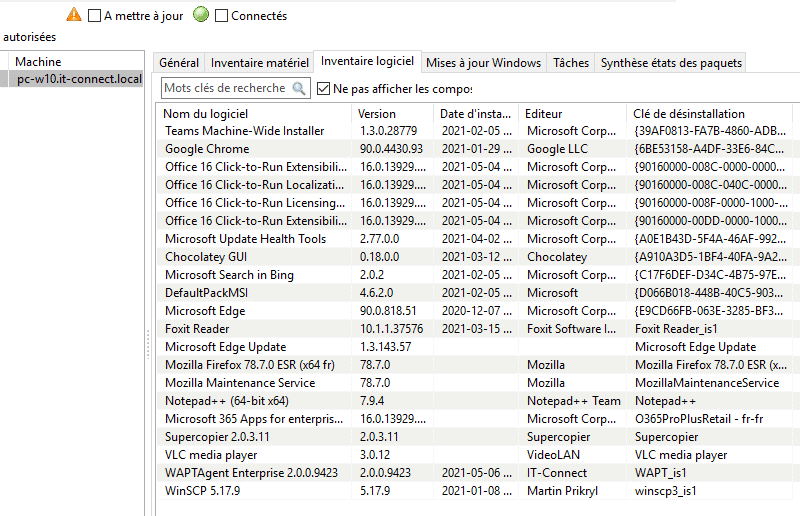
L'agent WAPT va remonter diverses informations au sujet de la machine vers le serveur WAPT : des informations générales comme le nom, l'OS, l'adresse IP, le type de machine, ou encore l'utilisateur connecté. En complément, un inventaire matériel complet sera remonté, ainsi qu'un inventaire des logiciels présents sur la machine.
On peut obtenir également un état sur les mises à jour Windows (si la fonction est activée dans l'agent), ainsi qu'un état des tâches et une synthèse des paquets déployés sur cette machine.
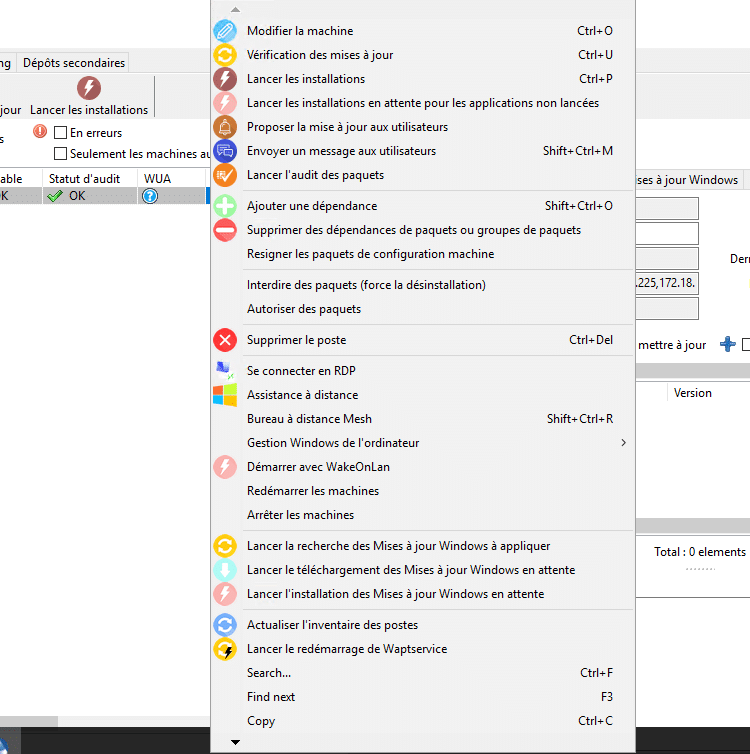
Lorsqu'une machine est remontée sur la console WAPT, elle devient gérable depuis cette console. Quand je dis gérable, c'est-à-dire qu'il y a de nombreuses fonctions intégrées pour faciliter la vie des administrateurs au quotidien. Par exemple, on démarrer ou redémarrer la machine à distance, forcer un gpupdate à distance, prendre la main sur la machine, accéder à la gestion des services, etc.
Passons au déploiement d'un logiciel sur notre poste...
IV. Déployer un logiciel avec WAPT
Dans cet exemple, je vous propose de déployer TightVNC au format MSI grâce à WAPT. Sachez qu'il est possible de déployer d'autres types de paquets, notamment au format EXE (cela nécessite un peu de recherche), mais aussi pour d'autres plateformes que Windows. En fait, WAPT permet d'aller vraiment très loin dans la personnalisation du déploiement (la documentation à ce sujet parle d'elle-même).
L'installation du paquet sur un poste sera effectuée seulement si le poste client a pu vérifier la signature du paquet. Puisque WAPT repose sur un principe de clé privée / publique (avec le certificat), cela permet de s'assurer de l'intégrité d'un paquet avant de l'installer.
Un paquet WAPT se présente sous la forme d'un ZIP qui contient différents fichiers, notamment le certificat, un script d'installation en Python, un fichier "control" qui est en quelque sorte la carte d'identité de votre paquet et les sources d'installation de votre logiciel.
Commencez par télécharger la dernière version de TightVNC sur le site officiel : Télécharger TightVNC
Sachez qu'il y a également un dépôt WAPT dans lequel vous pouvez piocher et que vous pouvez ajouter à votre serveur WAPT directement : Dépôt officiel WAPT
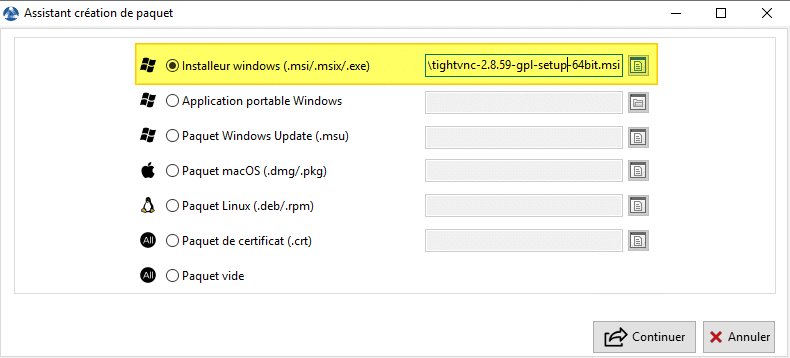
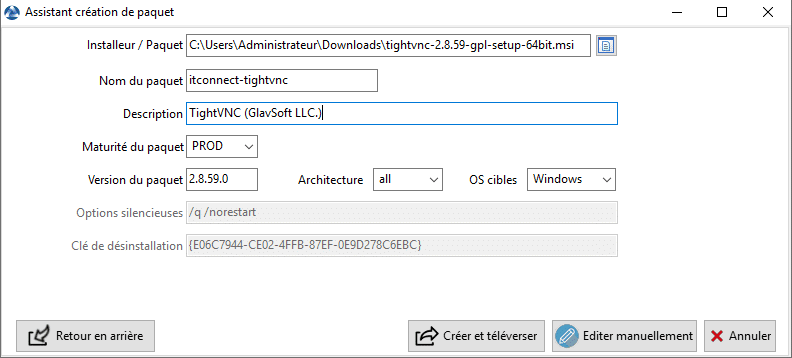
La suite se déroule dans la console WAPT : cliquez sur "Outils" puis "Générer un modèle de paquet". Cochez la case "Installeur Windows (.msi/.msix/.exe)" et indiquez le chemin vers notre MSI. Continuez...
On peut se satisfaire de cliquer sur "Créer et téléverser" : c'est un MSI donc tout est déjà prévu pour qu'il s'installe silencieusement.
Pour éditer le paquet ou tester son installation en local pour valider le processus, il faut cliquer sur "Éditer manuellement". Dans ce cas, vous devez disposer d'un IDE sur votre machine, par exemple PyScripter. C'est un bon moyen de tester l'installation et la désinstallation du logiciel avant de déployer le logiciel à grande échelle.
Vous remarquerez qu'il est possible d'ajuster la maturité du paquet : DEV, PREPROD et PROD, idéale pour gérer ses phases de déploiement.
Le paquet apparaît bien dans notre dépôt privé :
Pour le déployer sur nos postes clients, il y a plusieurs façons de faire : attribution sur une OU, attribution directe sur la machine ou encore utilisation du store Self-Service (nous y reviendrons). Pour automatiser le déploiement, l'idée c'est de créer une dépendance entre les machines cibles et le paquet à installer.
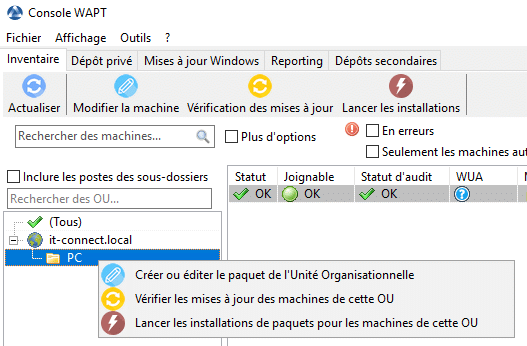
Par exemple, effectuez un clic droit sur l'OU "PC" puis "Créer ou éditer le paquet de l'Unité Organisationnelle".
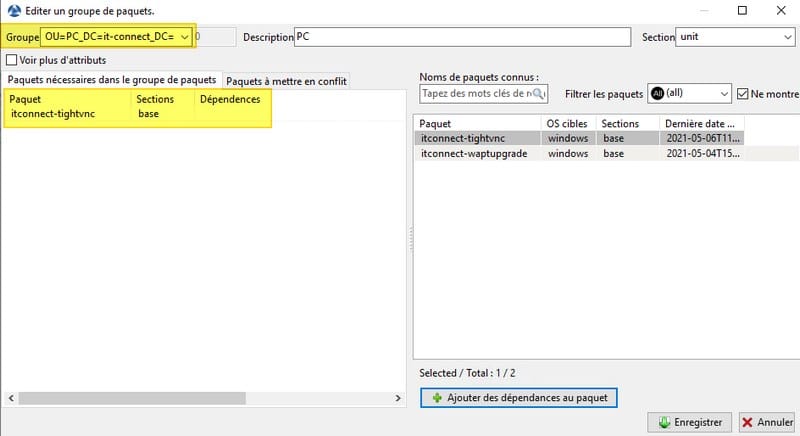
Il ne reste plus qu'à attribuer notre paquet TightVNC et à valider. Pour cela, il faut sélectionner le paquet à droite et cliquer sur "Ajouter des dépendances au paquet".
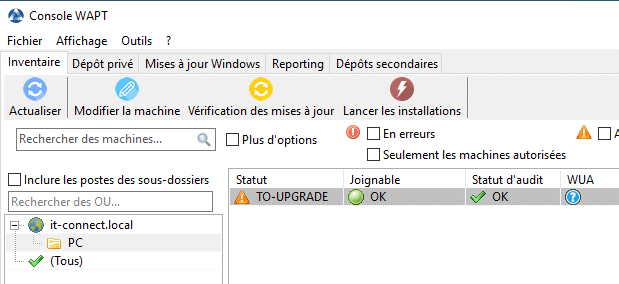
Après avoir lancé une actualisation de l'état du poste client, il apparaît avec le statut "TO-UPGRADE" : en effet, le paquet TightVNC n'est pas encore installé sur cette machine.
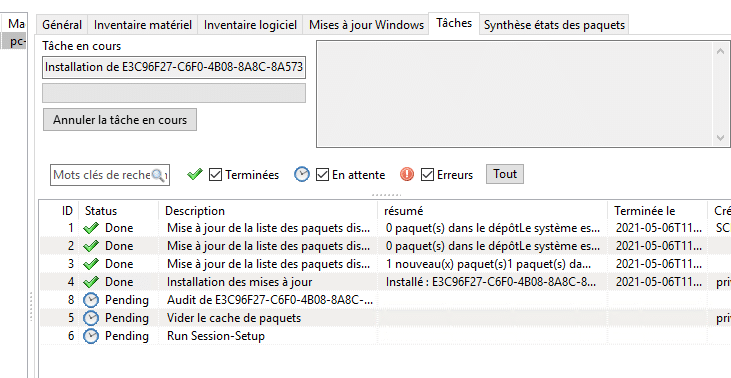
En cliquant sur le bouton "Lancer les installations", la tâche s'exécute immédiatement sur le poste client. D'ailleurs, dans l'onglet "Tâches" de notre poste client, on peut suivre toutes les étapes une par une. Au moins s'il y a une erreur ou un blocage, on pourra identifier plus facilement le problème (et à distance).
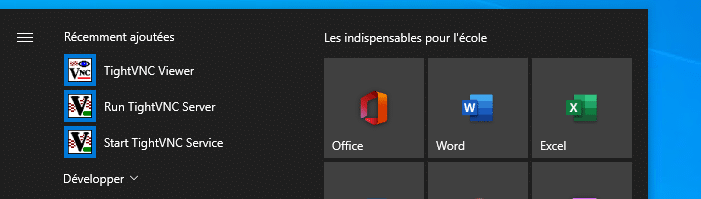
Après quelques secondes, l'installation est terminée et sur notre machine Windows 10, le logiciel TightVNC est bien installé !
Voilà, nous venons de déployer un logiciel en quelques minutes à l'aide de WAPT Enterprise.
V. Un store d'applications Self-service pour vos utilisateurs
La fonctionnalité "WAPT Self Service" est une possibilité supplémentaire pour mettre à disposition des logiciels sur votre parc informatique. En fait, sur chaque machine où l'agent WAPT est installé, il y a un outil nommé "Self service logiciels WAPT" qui est déployé. Il correspond à un magasin d'applications interne à votre entreprise : vous pouvez mettre à disposition de vos utilisateurs des logiciels, et ils peuvent effectuer l'installation en autonomie, sans les droits administrateurs !
Cette fonctionne s'appuie sur des règles de Self-service. Pour créer une règle : au sein de l'onglet "Dépôt privé", il faut cliquer sur "Générer un modèle de paquet" puis sur "Règles Self-Service".
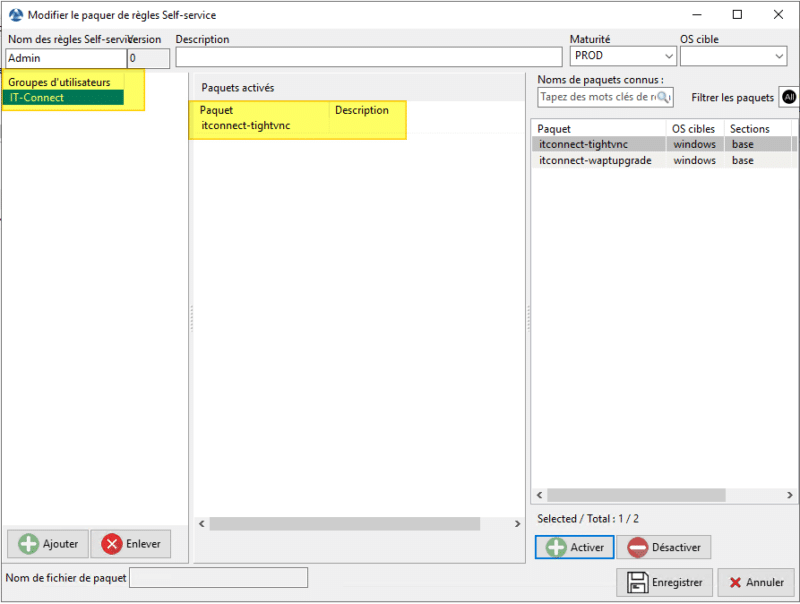
Ensuite, on donne un nom à cette règle et on doit préciser :
Les groupes d'utilisateurs : c'est-à-dire le nom d'un ou plusieurs groupes AD auxquels on veut rattacher cette règle. Dans mon exemple, le groupe AD "IT-Connect" : tous les membres de ce groupe auront accès, via le store, aux applications que je vais attribuer à cette règle
Paquets activés : la ou les applications (paquets) à autoriser via cette règle. Dans cet exemple, le paquet "itconnect-tightvnc" qui correspond au logiciel TightVNC
Lorsque la configuration est terminée, on clique sur "Enregistrer".
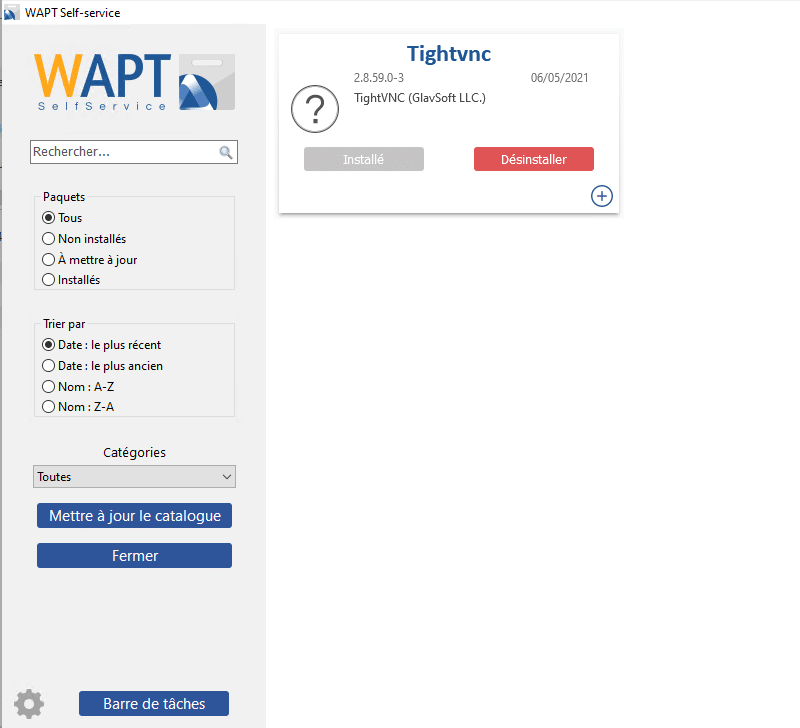
Sur le poste client Windows 10, j'ouvre WAPT Self-Service, je me connecte avec mon compte utilisateur Active Directory et je me retrouve avec TightVNC à ma disposition. Une zone de recherche permet de retrouver facilement un paquet lorsqu'il y en a des dizaines de publiés dans votre store d'entreprise. Par ailleurs, il y a quelques filtres accessibles directement sur la gauche.
Vous pouvez suivre cette vidéo officielle pour en savoir plus cette fonctionnalité :
VI. Conclusion
Cette découverte de WAPT touche à sa fin. Cette solution est très complète et son utilisation ne peut pas se résumer à un seul article. WAPT Enterprise est une solution certifiée par l'ANSSI (Agence nationale de la sécurité des systèmes d'information), elle bénéficie d'un Visa de sécurité et de la certification CSPN ce qui est un gage de qualité en matière de sécurité.
N'hésitez pas à laisser un commentaire sur cet article si vous avez des questions, ou si vous aimeriez un article sur une fonction spécifique de WAPT .






 La fonctionnalité "WAPT Self Service" est une possibilité supplémentaire pour mettre à disposition des logiciels sur votre parc informatique. En fait, sur chaque machine où l'agent WAPT est installé, il y a un outil nommé "Self service logiciels WAPT" qui est déployé. Il correspond à un magasin d'applications interne à votre entreprise : vous pouvez mettre à disposition de vos utilisateurs des logiciels, et ils peuvent effectuer l'installation en autonomie, sans les droits administrateurs !
La fonctionnalité "WAPT Self Service" est une possibilité supplémentaire pour mettre à disposition des logiciels sur votre parc informatique. En fait, sur chaque machine où l'agent WAPT est installé, il y a un outil nommé "Self service logiciels WAPT" qui est déployé. Il correspond à un magasin d'applications interne à votre entreprise : vous pouvez mettre à disposition de vos utilisateurs des logiciels, et ils peuvent effectuer l'installation en autonomie, sans les droits administrateurs !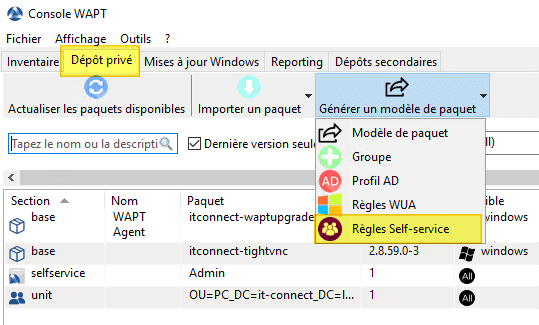
 .
.